





Description
根据基板大小,划分了3种型号。
UNIX-DF204S/UNIX-DF304S/UNIX-DF404S焊锡机器人对其网络功能及运转节拍的节约方面进行了强化 。
它可以连接至网络,可显示每次锡焊的过程与结果。附加的2个轴可以改变角度或旋转基板,这使得锡焊复杂困难的部分也从现在起成为了可能。这些型号的锡焊机器人都也可用于激光锡焊。
| UNIX-DF204S焊锡机器人 | UNIX-DF304S焊锡机器人 | UNIX-DF404S 焊锡机器人 |
 |
 |
 |
| 小型 | 中型 | 宽型 |
| 节省空间的紧凑型,易于操作,焊锡可靠性高
工作台:200mm*210mm X,Y轴:600mm/s Z轴:250mm/s 独立焊锡控制器 |
应用范围最广泛
工作台:300mm*275mm X,Y轴:900mm/s Z轴:400mm/s 内置焊锡控制器 |
大行程范围的优秀型号,重负载,最适合大的线路板,支持M型基板 工作台: 400毫米×365毫米X,Y轴:900毫米/秒Z轴:400mm/s内置焊锡控制器 |

1)主要特长:工业4.0版本的网络功能的强化
连接到工厂网络,MES,实现流程可视化,有效监视生产状态(选配件)
|
 |
工业4.0 版本的各锡焊过程的数据管理
|
通过连接DF显示器软件,实现各过程的可视化。例如可将温度,程序运行情况等转化为可视化,形象化的数字数据。 例如,观察锡焊过程中的温度变化,如果发生了非常规的温度变化或程序错误,它将捕捉到这些非常规的变化并通知错误。 并且,该系统在连接至互联网或内联网的情况下,可以通知错误并发送警告邮件至预先注册的邮箱地址。这样的实时监控可以让您立即对错误与缺陷作出反应。 另外,所有数据都能以 CSV 格式导出。各过程的各运行操作日志数据可以用于调查并探索改进生产,工作效率的方法。 现在可以使用更多高级焊接管理软件“ Soldering Manager”(付费版本)。 |
 |
2) 3D锡焊(万向焊锡)与MID(模塑互联装置)
标准品为4轴,可以选配追加2个辅助轴,最多可控制6轴。可同时控制操作所有机器人操作和外部设备 + 2台外部电机:辅助轴(可选)
实现各个角度的焊锡,解决目前传统机器人无法实现的在同一程序中实现不同角度的焊接。
追加两个附加轴至加工对象物区域。辅助轴使灵活焊锡成为可能,可进行各种动作,不需附加功能即可更容易焊锡复杂形状的产品,部件和电路板。 如部件旋转、基板反转、角度倾斜、圆柱形部件旋转、固定电线等。
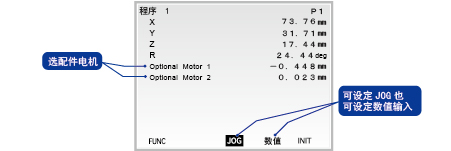
与机器人轴的操纵相同在示教器上最多可示教2台步进电机和伺服电机等脉冲列输入形式的装置。“设置转盘可改变工件的方向”、“通过机器人来控制所设置的传送带”等用途多种多样
节省空间,简单设置。
 |
 |
 |
3)新型加热器性能显著改进,达到更好的生产效率。
|
 |

4) 可轻松导入视觉系统
- 对应日趋精细化的生产作业将摄像头功能进行强化。在原本方便的位置补正功能之上,又追加了自动校准功能和带计算的CCD摄像头补正功能等,进一步增大了摄像头系统的运用机会。
- 带计算的摄像头补正功能
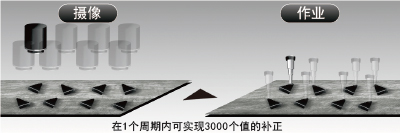
- 强化了边在摄像头上进行位置补正边进行作业的功能。因为在机器人中最多可导入3000个补正值,所以针对以托盘形式排列的工件进行作业时,不是“摄像”→“作业”→“下一工件的摄像”→“对下一工件进行作业”・・・的反复循环,而是“连续摄像”→“连续作业”,很有效地缩短了作业时间。
5) 通过增加刚性和处理速度来减少操作时间
- 电机改变,提高工具重量和最大工件重量.增强最大工作负载由11kg到15kg.(仅UNIX-DF303L/DF304S/DF403L/DF404S);尺寸UNIX-DF304S/UNIX-DF404S焊锡机器人已实现最高速度900mm/sec、工具最大质量7kg。
- 改善以前型号刚性机构,提高了刚性(UNIX-DF204S),由于刚性增强,显著提高了最大速度和加速度.改善机器人和焊接处理能力,减少节拍时间
- 可更高速、更准确地进行作业,并且提升刚性使其能够被长期安心的使用。使其高速运转时的轨迹性能更趋稳定
- 在Z结构中装入摄像头时,动作停止时的震动时间大幅度缩短,并且等待时间也大约缩短一半。(与本公司的产品相比)
6) 管理隐形缺陷模式
|
UNI-TESTER兼容(可选),为了保持稳定的锡焊质量,测量烙铁头温度同时测量烙铁头泄漏电压和接地电阻,这对过程控制非常重要。 烙铁头温度的不稳定会影响焊点的光洁度。漏电和瞬态电压可能会导致组件内部损坏。 从设备保护的角度出发,测量并确保尖端与地面之间的电阻是有必要的。 UNI-TESTER与IEC-61191-1 (Ed3 / 2018)和IPC J-STD-001G兼容,可以同时实现各种测量以及烙铁头自动温度补偿 。 |
 |
7) 新的界面已改善了教导机器人的进程,更简单和更加人性化—更容易操作和维护更简单,更易于使用
- 装备新型送锡器,简化改变锡线直径的过程,可轻松更换滚轴配置和焊锡直径。只需更换送锡块即可改变锡线直径,不需要调整。
- 也包括了避免助焊剂飞溅的破锡送锡装置。通过简单地更换送锡块,可以轻松地在标准送锡装置和CLEAN-CUT型送锡装置之间切换。
- 要点图表编辑功能,在生产时创建教学数据。
- 以导入的背景图像数据(JPEG)・DXF数据・Gerber数据为基础,可描绘点・直线(线段)・圆・圆弧。 通过自动探索可以在PC上正确地进行复杂的定位。
- 加载用于使用专用PC软件焊接的电路板的DXF,Gerber数据,图像文件等,并在电脑屏幕上创造一个机器人程序或电路板被焊接用专门电脑软件
- 方向指定排序功能
- 有多数路径时,按照路径开始点的顺序排序,可缩短周期时间。
- R角处理自动圆弧制作功能
- 通过指定角的半径,有附带R功能,更容易编辑。通过生产准备程序数据,轻松切换产品类型。
- 储存多达999个程序,轻松管理数据和产品类型
- 为每一个程序存储不同的产品型号
- 为每个烙铁头形状或温度设置管理程序。
- 对每个程序,不同形状烙铁头都可用三轴位置校正(选配)
- 用计数器功能为每个程序设置计数器,以计算三轴位置的校正和清洁
- 存储每种产品的详细设置以快速更改设置和编程
| 通过开关盒很容易更改程序 | 使用前面板上的按键开关设置 |
 |
 |
| 开关盒配有选择开关
中间的开关可以轻松选择并执行程序(2ch) |
快速检查和改变温度设置
更换烙铁头能自动调整 |
新型系统软件
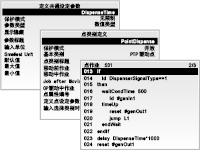
因为是针对各类应用的专用软件,所以初学者也可容易地进行示教,同时也可以使用丰富而多样的命令组。
| 全程序的共通设定 | 错误记录 | 简易PLC功能 | 自定义功能 |
 |
 |
 |
 |
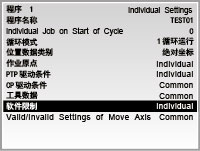
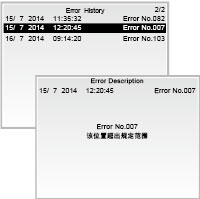
| 在所有程序中同一设定较多的“作业原点”、“软限制”、“PTP驱动条件”等项目使共通设定已成为可能。因为设定只要进行一次,所以有助于示教时间的缩短和条件的修改。当然,也可任意切换成个别设定 | 可显示错误发生的日期和时间。
因为可以特定错误发生的时间,所以有助于原因的解析等 错误记录可保留最近发生的1000次错误。 |
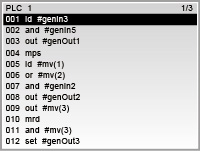
简单PLC数达100
关于机器人的功能,因为内置了单独运作的简易PLC,所以如果是和外部机器进行简单地通信则无需另外购置 |
PC软件 “JR C-PointsⅡ” (选配件)
| “JR C-PointsⅡ”是独创对话式程序输入系统,在计算机上示教数据,以及自定义数据的制作、编辑和保存。可更加轻松地进行基于数值输入的point设定和point作业命令的制作、编辑等。
就像使用电子表格一样也可以进行坐标数据的复制和粘贴等。另外,能以图形形象地制作、编辑路径数据的“point图表编辑功能”使操作更加方便。可将“JR C-Points”的示教数据转换成“JR C-PointsⅡ”用数据。 |
 |
8) 示教器的显示语言可从11种语言中进行选择
示教器的显示语言可从中文(简体字・繁体字)、日语、英语、法语、西班牙语、意大利语、德语、韩语、捷克语、越南语11种语言中进行选择。
继承了UNIX-41*G系列的其它简易示教、迷宫结构、自定义功能、简易定序器、显示单位切换等特性。
9) 应对现场总线
有效应对现场总线使其与自动生产线和自动机械的嵌入更加简便。程序编号的设定、启动不言而喻,还能进行位置信息的获取和程序的重写。
现场总线的模组可从“DeviceNet”、“PROFIBUS”、“CC-Link”、“EtherNet/IP”、“PROFINET”、“CANopen”中进行选择。
标准配置
提供最大效益的各种型号配置
机器人配置详细信息(UNIX-DF204S/304S/404S)
| 焊锡控制器 | UNIX-DF204S | DF-UPC-125 |
| UNIX-DF304S/404S | 已并入主机 | |
| 焊接头 | UNIX-DF204S | 从UMC-093/UMC-093S选择 |
| UNIX-DF304S/404S | 从UMC-090-BHS/UMC-090-BHL选择(选配件) | |
| 送锡器 | UNIX-DF204S | 从UPM-025/UPM-025CC选择 |
| UNIX-DF304S/404S | 从UPM-024/UPM-024CC选择 | |
| 带真空功能烙铁头清洁盒 | UJC-214WIIL | |
| 锁定机构 | 型号据规格而定(详细见下) | |
| 送锡管设置 | 型号据使用锡线直径而不同(详细见下) | |
| 开关盒 | DF-SBU(线长1.5M) | |
| 教导面板 | DF-TPU(线长2M) | |
| 电脑软件 | DF EDITOR SJ(日语)DF EDITOR SE(英语) | |
技术参数
| 型号 | UNIX-DF204S焊锡机器人 | UNIX-DF304S焊锡机器人 | UNIX-DF404S焊锡机器人 | |
| 轴数 | 4个标准轴,2个附加轴,最多同时控制6轴 | |||
| 运行范围 | X轴 | 200mm | 300mm | 400mm |
| Y轴 | 250mm | 320mm | 400mm | |
| Z轴 | 50mm | 100mm | ||
| R轴 | ±360度 | ±360度 | ±360度 | |
| 最大可移动重量(工件) | 7kg | 15kg | ||
| 最高速度 (PTP) | X,Y轴 | 600mm/s | 900mm/s | |
| Z轴 | 250mm/s | 400mm/s | ||
| R轴 | 600°/s | 900°/s | 900°/s | |
| 最高速度(CP) | X/Y/Z轴合成 | 600mm/s | 850mm/s | |
| 位置往返精度 | X/Y轴 | ±0.01mm | ||
| Z轴 | ±0.01mm | |||
| R轴 | ±0.008度 | |||
| 工件尺寸(最大夹具尺寸) | 200*210mm | 300*275mm | 400*365mm | |
| 位置教导方法 | 修正或输入数字(MDI) | |||
| 教导形态 | 通过教导面板直接示教/通过电脑软件离线示教 | |||
| 程序数 | 999程序 | |||
| 点记忆容量 | 最大32,000点 | |||
| 驱动方式 | 5相步进马达 | |||
| 控制方式 | PTP控制,CP控制 | |||
| 插补功能 | 3次元直线插补,3次元圆弧插补 | |||
| 外部接口I/O | I/O-SYS | 输入16点,输出16点 | ||
| I/O-1 | 输入8点,输出8点(含继电器4输出点) | |||
| I/O-MT / I/O-S | I/O MT:外部监视器控制(选配 I/O-S:连锁装置如区域感应器 | |||
| I/O-A /I/O-B /I/O-C | I/O-A:连接吹气清洁盒 I/O-B:连接钢刷清洁盒 I/O-C:连接3轴位置补正机构 | |||
| COM1 | RS232C(外部设备控制,COM命令) | |||
| COM2/COM3 | RS232C(外部设备控制) | |||
| 存储 | USB存储连接(保存和下载教导数据,更新系统软件) | |||
| LAN | 通过以太网连接电脑(10BASE-T/100BASE-T) 用控制命令控制机器人,连接电脑软件) | |||
| 简易PLC功能 | 1,000程序 1,000步/程序 | |||
| 焊锡条件数量 | 255条件 | |||
| 烙铁头温度控制范围 | 200-450℃ | |||
| 加热器报警值 | 可设定±5-99℃ | |||
| 加热器功率 | 250W:十字加热器LS/十字加热器L | |||
| 使用锡线直径 | Φ0.3-1.2mm(标准), Φ0.6-1.0mm(clean cut型) | |||
| 警报显示 | 未连接加热器/未连接温度感应器/锡线堵塞等 | |||
| 外形尺寸(W*D*H) | 413*387*706mm 560*575*934mm 584*635*934mm | |||
| 电源 | AC100-120V 50/60Hz 550W(VA) AC220-240V 50/60Hz 550W(VA) | |||
| 空气 | 干空气,0.5Mpa(最大) | |||
| 温度 | ||||
| 湿度 | 20-95%(无凝霜) | |||
| 重量 | 约35kg | 约45kg | 约52kg | |
应用案例
车载电子元件
LCD元件,手提电脑LCD元件,手提电脑电池接线端子,手机电池接线端子(接线柱?),光学磁头,LCD和等离子TV电源板,扁平马达(flat motors),马达控制线圈散热器,制动马达,空调电扇马达,电脑电扇马达,功率调节器等


绝对传感器
通讯产品及电源
移动设备袖珍扬声器,STN LCD TAB(结合)接线端子,手提电脑连接器,引脚小于0.5mm细间距连接器,手机传声器接收端子

表面贴装光电接收器模块

汽车电池
家用数字AV和家庭应用LCD元件,手提电脑LCD元件,电池接线端子,光学磁头,LCD和等离子TV电源板,扁平马达,马达控制线圈散热器,制动马达,空调电扇马达,电脑电扇马达,功率调节器等

调谐器

表面贴装光接收模块
移动数字AV应用
移动设备袖珍扬声器,STN LCD结合接线端子,
手提电脑连接器,引脚小于0.5mm细间距连接器,
手机传声器接收端子

手表软板

表面贴装CMOS传感器IC端子
车载电子
近年来,模块化已迅速发展。车载电子元件需要安全和高可靠性,所以控制焊锡质量的最高水平是必需的。高速焊锡机器人可靠,操作方便,甚至能使初学者达到专家焊锡质量

太阳能光电板
桌面焊锡机器人甚至用于超声波焊接的小太阳能电池板等产品。他们也广泛用于如功率调节器线路板,接线盒等焊锡
智能手机
对于智能手机和手机应用程序基板会越来越密集和细小,更 轻。桌面焊锡机器人支持多种表面贴装组件,也广泛用于微小焊锡



.jpg)








陈工 –
DF及以前的系统可以直接添加KEYENCE的相机做补正,而不需要另外的工控机,这点挺好的。服务的也不错,全程调试好,命令写好。备份都主动做好,不错的。听说康耐视,松下的智能相机都能添加,机器功能还是非常强大